
Del 329
Del 545 i serien Springer International Series in Engineering and Computer Science
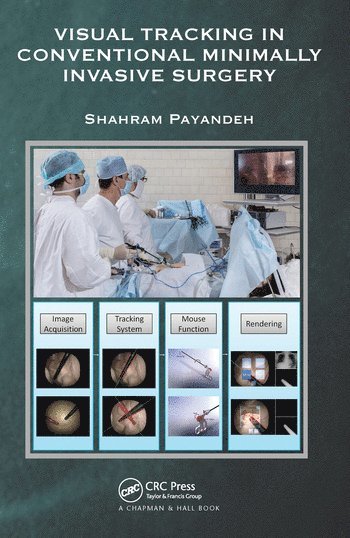
Engineering Approaches to Mechanical and Robotic Design for Minimally Invasive Surgery (MIS)
Häftad, Engelska, 2012
2 149 kr
Beställningsvara. Skickas inom 10-15 vardagar. Fri frakt för medlemmar vid köp för minst 249 kr.
Finns i fler format (1)
Within the past twenty years, the field of robotics has been finding many areas of applications ranging from space to underwater explo rations. One of these areas which is slowly gaining popularity among the users group is the notion of service robotics. This book is an in vestigation and exploration of engineering principles in the design and development of mechanisms and robotic devices that can be used in the field of surgery. Specifically the results of this book can be used for designing tools for class of Minimally Invasive Surgery (MIS). Generally, Minimal Invasive Surgery (MIS), e. g. laparoscopic surgery, is performed by using long surgical tools, that are inserted through small incisions at the ports of entry to the body (e. g. abdominal wall) for reaching the surgical site. The main drawback of current designs of en doscopic tools is that they are not able to extend all the movements and sensory capabilities of the surgeon's hand to the surgical site. By im proving surgical procedures, training, and more practice, it is possible for surgeons to reduce completion time for each task and increase their level of skill. However, even in the best cases the level of performance of a surgeon in Minimally Invasive Surgery is still a fraction of the con ventional surgery. Any dramatically improvement is usually driven by introduction of new tools or systems that in turn bring totally new pro cedures and set of skills.
Produktinformation
- Utgivningsdatum2012-10-17
- Mått155 x 235 x 12 mm
- Vikt324 g
- FormatHäftad
- SpråkEngelska
- SerieSpringer International Series in Engineering and Computer Science
- Antal sidor183
- FörlagSpringer-Verlag New York Inc.
- ISBN9781461369844
Tillhör följande kategorier
Hoppa över listan


Mer från samma serie
Privacy, Security and Trust within the Context of Pervasive Computing
Philip Robinson, Harald Vogt, Waleed Wagealla
Inbunden
1 439 kr
Matching Properties of Deep Sub-Micron MOS Transistors
Jeroen A. Croon, Willy M Sansen, Herman E. Maes
Inbunden
2 089 kr
Hoppa över listan
Du kanske också är intresserad av
Engineering Approaches to Mechanical and Robotic Design for Minimally Invasive Surgery (MIS)
Ali Faraz, Shahram Payandeh
Inbunden
2 149 kr
Del 545
Ecology, Settlement and History in the Osmore Drainage, Peru, Part i
Don S Rice, Charles Stanish, Philip R Scarr
Häftad
999 kr
Del 545
- Nyhet
- Nyhet
- Nyhet
Del 7